|
Research
My primary interest is enabling autonomy for robots through robust and accurate state estimation.
Much of my research is mainly focused on visual (cameras) and inertial (IMUs) sensing modalities, but have dabbled in different sensing types to try to either improve robustness or increase overall trajectory accuracy.
I also maintain the OpenVINS project, which is a state-of-the-art filter-based visual-inertial estimator that was developed in house by our research group.
I have highlighted papers that are of special interest or what I consider my most interesting works.
|
|
|
Efficient, Consistent, and Persistent Visual-Inertial Navigation
Patrick Geneva
University of Delaware, 2025
bibtex /
pdf
|
|
|
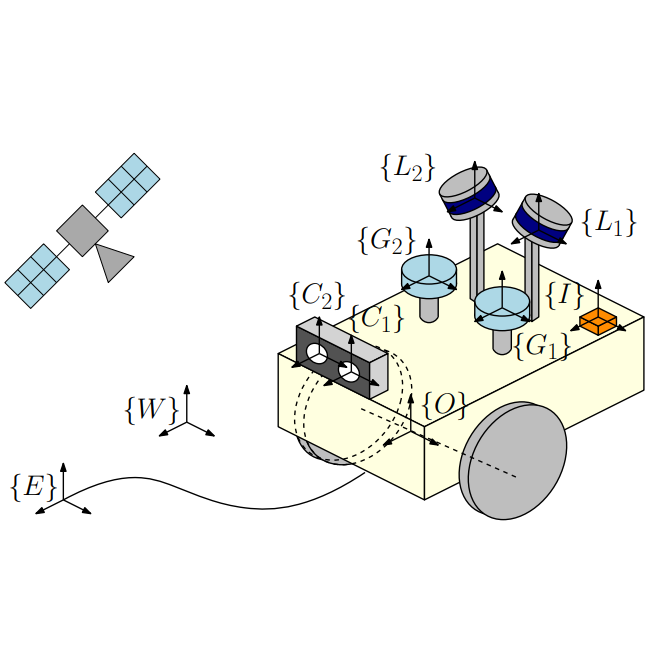
MINS: Efficient and Robust Multisensor-aided Inertial Navigation System
Woosik Lee,
Patrick Geneva,
Chuchu Chen,
Guoquan Huang
Journal of Field Robotics, 2025
bibtex /
pdf /
arXiv /
code
|
|
|
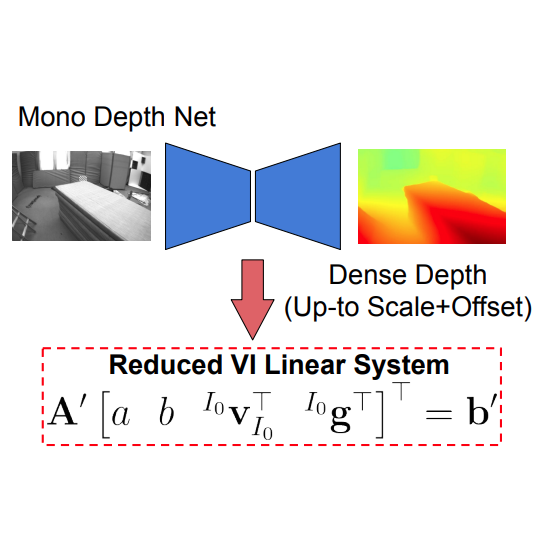
Fast and Robust Learned Single-View Depth-aided Monocular Visual-Inertial Initialization
Nate Merrill*,
Patrick Geneva*,
Saimouli Katragadda,
Chuchu Chen,
Guoquan Huang
International Journal of Robotics Research, 2024
bibtex /
pdf
|
|
|
Online Determination of Legged Kinematics
Chinmay Burgul,
Woosik Lee,
Patrick Geneva,
Guoquan Huang
Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
bibtex /
pdf /
tech report /
video
|
|
|
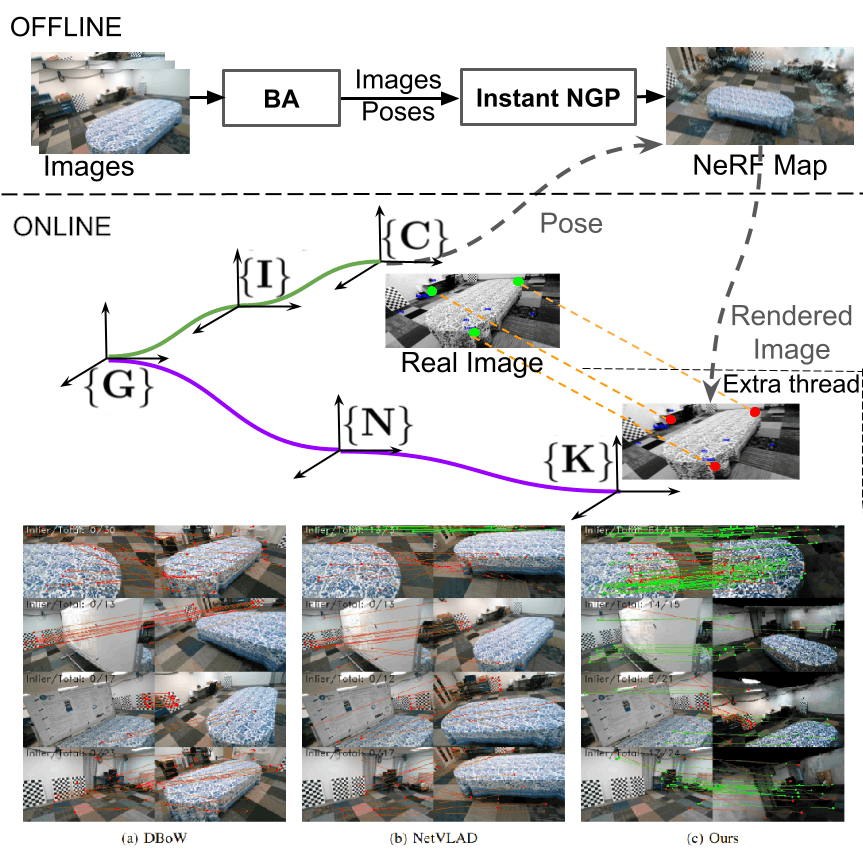
NeRF-VINS: A Real-time Neural Radiance Field Map-based Visual-Inertial Navigation System
Saimouli Katragadda,
Woosik Lee,
Yuxiang Peng,
Patrick Geneva,
Chuchu Chen,
Chao Guo,
Mingyang Li,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2024
bibtex /
pdf /
arXiv /
tech report /
video
|
|
|
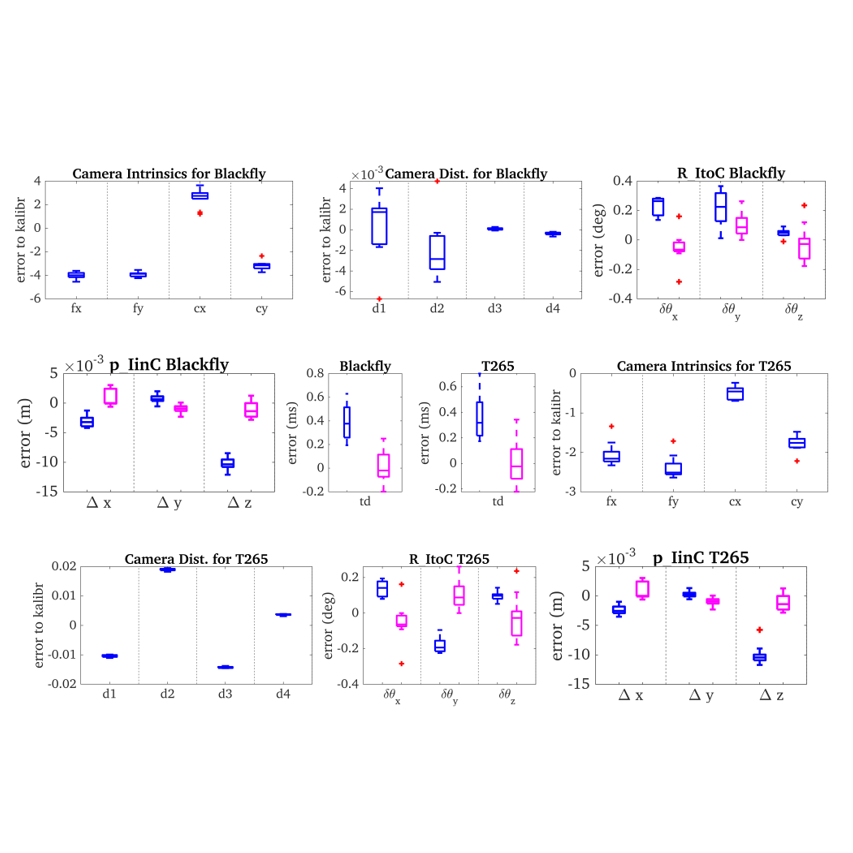
Multi-Visual-Inertial System: Analysis, Calibration and Estimation
Yulin Yang,
Patrick Geneva,
Guoquan Huang
The International Journal of Robotics Research, 2024
bibtex /
pdf /
arXiv /
tech report /
dataset
|
|
|
Optimization-based VINS: Consistency, Marginalization, and FEJ
Chuchu Chen,
Patrick Geneva,
Yuxiang Peng,
Woosik Lee,
Guoquan Huang
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
bibtex /
pdf /
tech report /
talk /
slides
|
|
|
Monocular Visual-Inertial Odometry with Planar Regularities
Chuchu Chen*,
Patrick Geneva*,
Yuxiang Peng,
Woosik Lee,
Guoquan Huang
2023 International Conference on Robotics and Automation (ICRA), 2023
bibtex /
pdf /
video /
talk /
code /
dataset /
slides /
poster
|
|
|
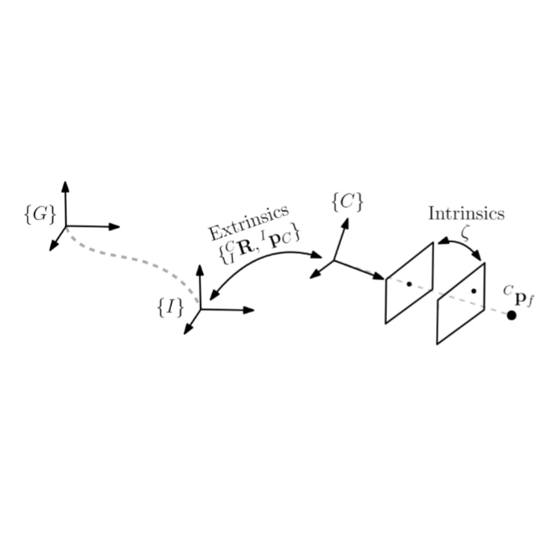
Online Self-Calibration for Visual-Inertial Navigation Systems: Models, Analysis and Degeneracy
Yulin Yang,
Patrick Geneva,
Xingxing Zuo,
Guoquan Huang
IEEE Transactions on Robotics, 2023
bibtex /
pdf /
arXiv /
tech report /
video /
code
|
|
|
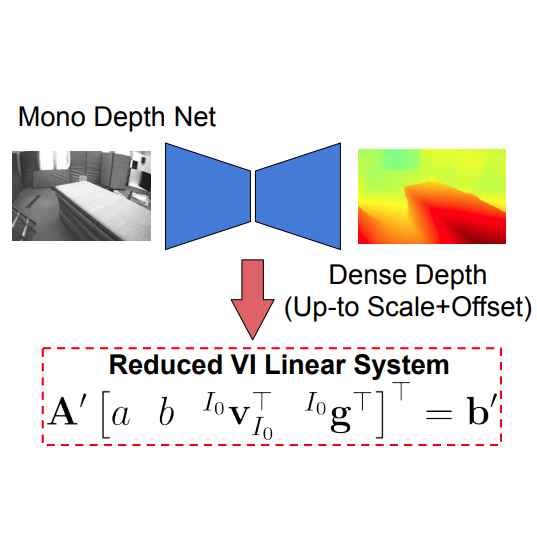
Fast Monocular Visual-Inertial Initialization Leveraging Learned Single-View Depth
Nathaniel Merrill*,
Patrick Geneva*,
Saimouli Katragadda,
Chuchu Chen,
Guoquan Huang
Robotics: Science and Systems XIV, 2023
bibtex /
pdf /
tech report /
video /
talk /
slides /
poster
|
|
|
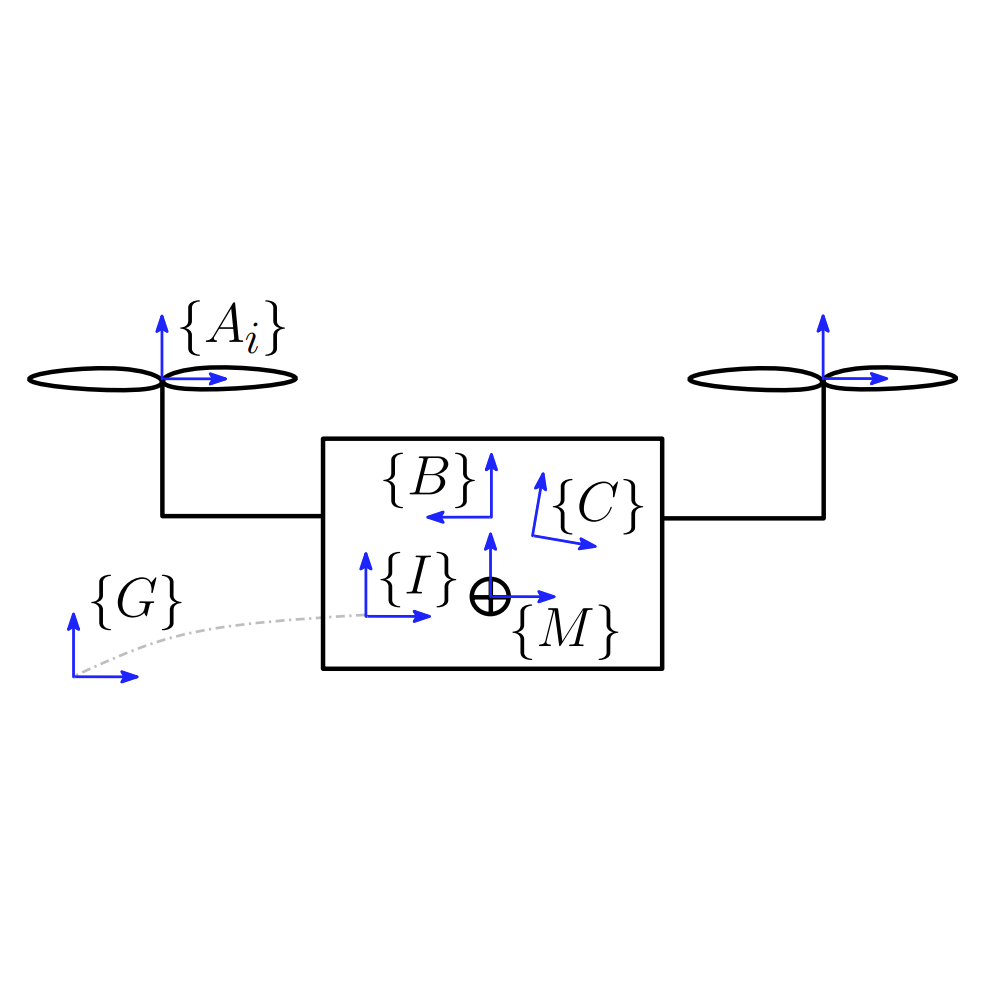
Visual-Inertial-Aided Online MAV System Identification
Chuchu Chen*,
Yulin Yang*,
Patrick Geneva,
Woosik Lee,
Guoquan Huang
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
bibtex /
pdf /
tech report /
video /
talk /
slides
|
|
|
Map-based Visual-Inertial Localization: A Numerical Study
Patrick Geneva,
Guoquan Huang
2022 International Conference on Robotics and Automation (ICRA), 2022
bibtex /
pdf /
tech report /
video /
talk /
slides /
poster
|
|
|
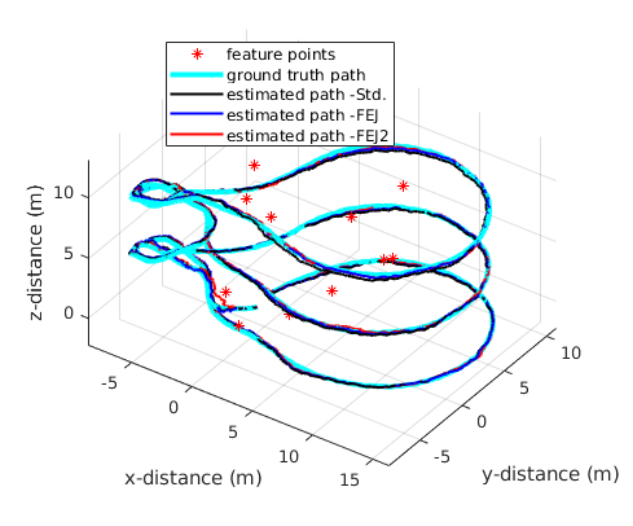
FEJ2: A Consistent Visual-Inertial State Estimator Design
Chuchu Chen,
Yulin Yang,
Patrick Geneva,
Guoquan Huang
2022 International Conference on Robotics and Automation (ICRA), 2022
bibtex /
pdf /
tech report /
talk /
slides /
poster
|
|
|
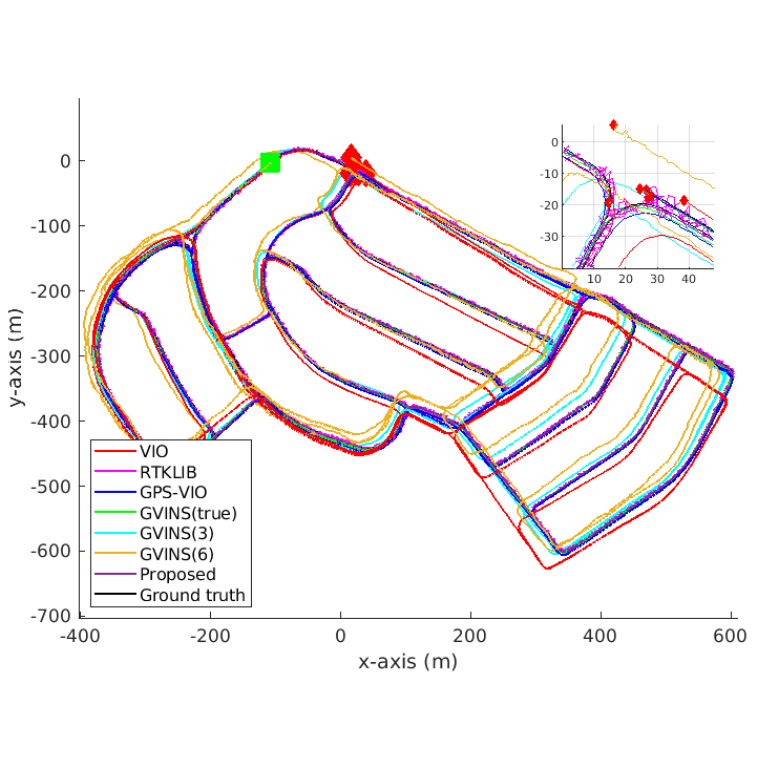
Tightly-coupled GNSS-aided Visual-Inertial Localization
Woosik Lee,
Patrick Geneva,
Yulin Yang,
Guoquan Huang
2022 International Conference on Robotics and Automation (ICRA), 2022
bibtex /
pdf /
talk /
slides /
poster
|
|
|
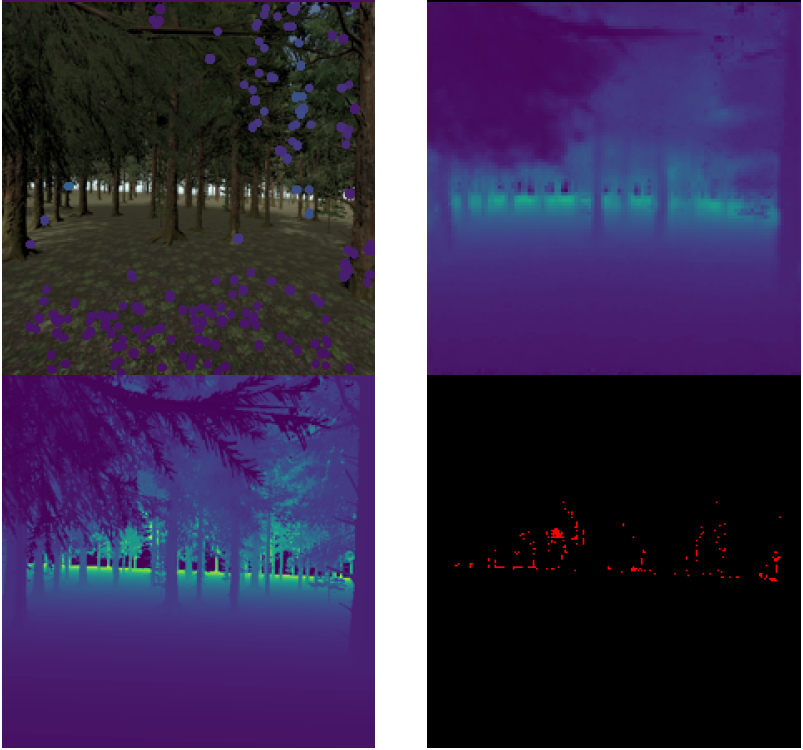
Robust monocular visual-inertial depth completion for embedded systems
Nathaniel Merrill*,
Patrick Geneva*,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2021
bibtex /
pdf /
video /
talk /
slides
|
|
|
MIMC-VINS: A Versatile and Resilient Multi-IMU Multi-Camera Visual-Inertial Navigation System
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
IEEE Transactions on Robotics, 2021
bibtex /
pdf /
arXiv /
video
|
|
|
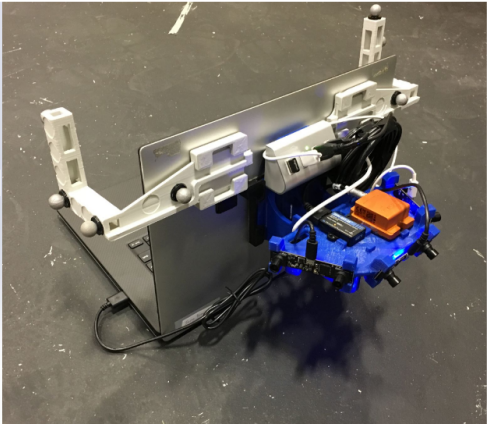
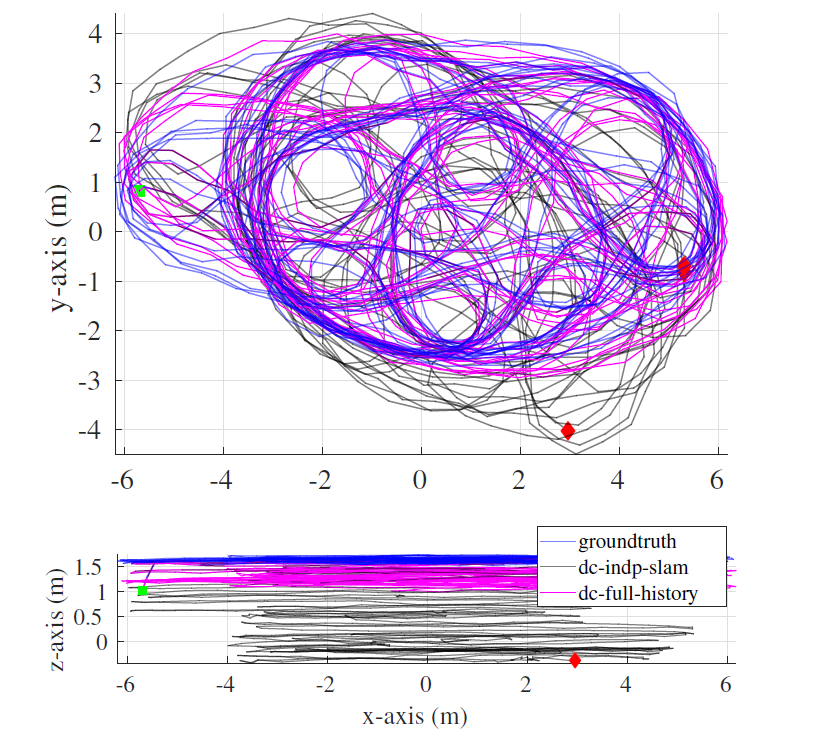
Distributed Visual-Inertial Cooperative Localization
Pengxiang Zhu*,
Patrick Geneva*,
Wei Ren,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
bibtex /
pdf /
arXiv /
video /
talk /
slides
|
|
|
iCalib: Inertial Aided Multi-Sensor Calibration
Yulin Yang,
Woosik Lee,
Philip Osteen,
Patrick Geneva,
Xingxing Zuo,
Guoquan Huang
Workshop on Visual-Inertial Navigation Systems, 2021
bibtex /
pdf /
talk /
slides
|
|
|
OpenVINS: A Research Platform for Visual-Inertial Estimation
Patrick Geneva,
Kevin Eckenhoff,
Woosik Lee,
Yulin Yang,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2020
bibtex /
pdf /
video /
talk /
code /
slides
|
|
|
Schmidt-EKF-based Visual-Inertial Moving Object Tracking
Kevin Eckenhoff,
Patrick Geneva,
Nathaniel Merrill,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2020
bibtex /
pdf /
video /
talk /
slides
|
|
|
Intermittent GPS-aided VIO: Online Initialization and Calibration
Woosik Lee,
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2020
bibtex /
pdf /
tech report /
video /
talk /
dataset /
slides
|
|
|
Versatile 3D Multi-Sensor Fusion for Lightweight 2D Localization
Patrick Geneva*,
Nathaniel Merrill*,
Yulin Yang,
Chuchu Chen,
Woosik Lee,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
bibtex /
pdf /
video /
slides
|
|
|
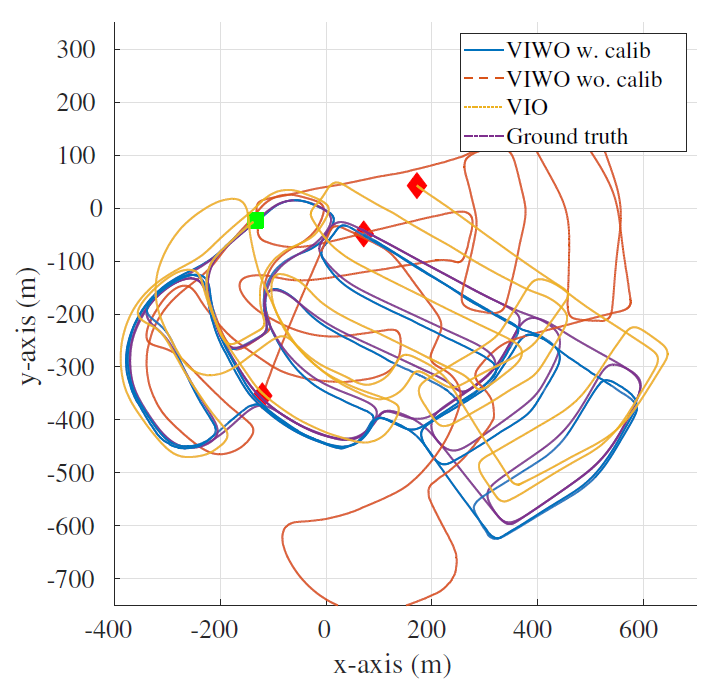
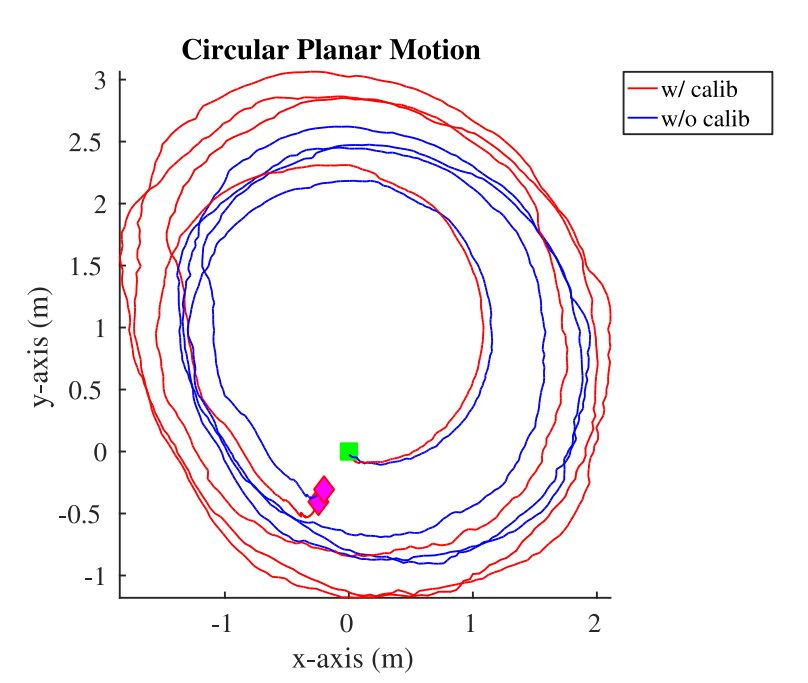
Visual-Inertial-Wheel Odometry with Online Calibration
Woosik Lee,
Kevin Eckenhoff,
Yulin Yang,
Patrick Geneva,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
bibtex /
pdf /
tech report /
video /
slides
|
|
|
LIC-Fusion 2.0: LiDAR-Inertial-Camera Odometry with Sliding-Window Plane-Feature Tracking
Xingxing Zuo,
Yulin Yang,
Patrick Geneva,
Jiajun Lv,
Yong Liu,
Guoquan Huang,
Marc Pollefeys
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
bibtex /
pdf /
arXiv /
tech report /
video /
talk /
slides
|
|
|
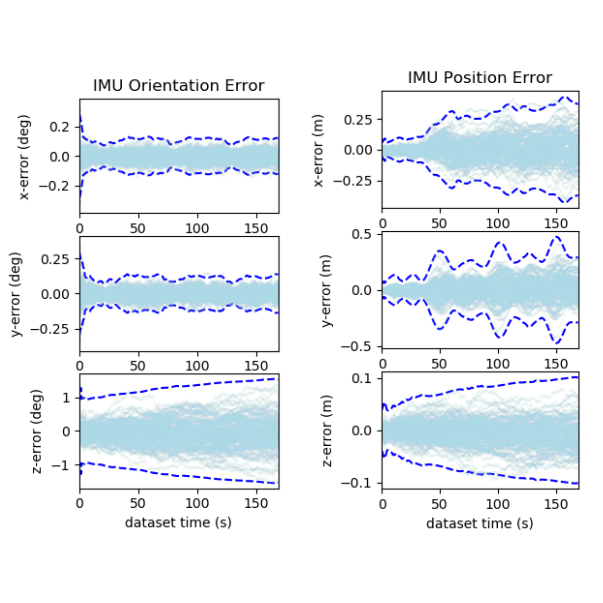
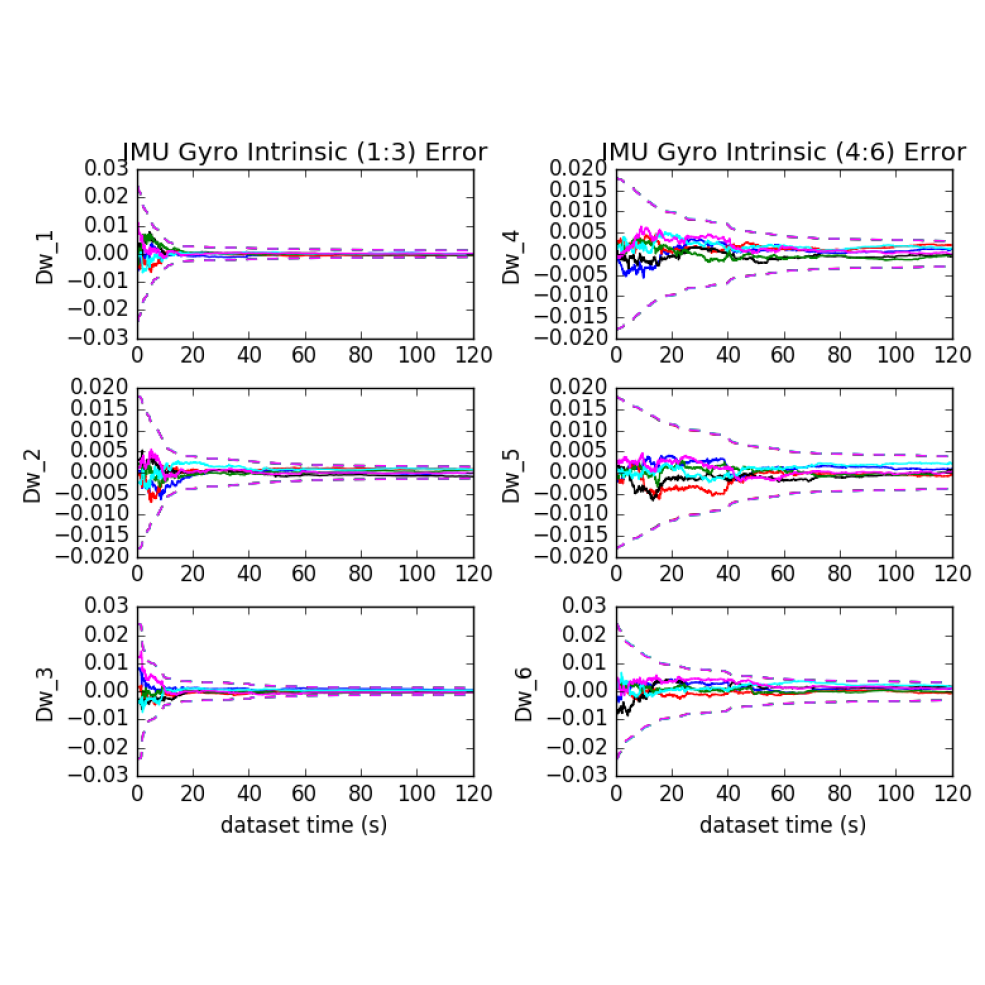
Online IMU Intrinsic Calibration: Is It Necessary?
Yulin Yang,
Patrick Geneva,
Xingxing Zuo,
Guoquan Huang
Robotics: Science and Systems XVI, 2020
bibtex /
pdf /
tech report /
talk /
slides
|
|
|
Tightly-Coupled Visual-Inertial Localization and 3D Rigid-Body Target Tracking
Kevin Eckenhoff,
Yulin Yang,
Patrick Geneva,
Guoquan Huang
IEEE Robotics and Automation Letters, 2019
bibtex /
pdf /
tech report /
video /
slides
|
|
|
Degenerate Motion Analysis for Aided INS with Online Spatial and Temporal Calibration
Yulin Yang,
Patrick Geneva,
Kevin Eckenhoff,
Guoquan Huang
IEEE Robotics and Automation Letters, 2019
bibtex /
pdf /
tech report /
video /
poster
|
|
|
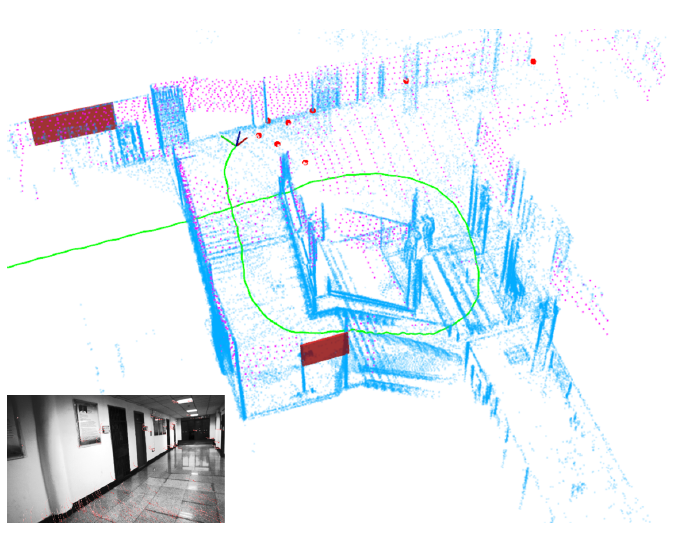
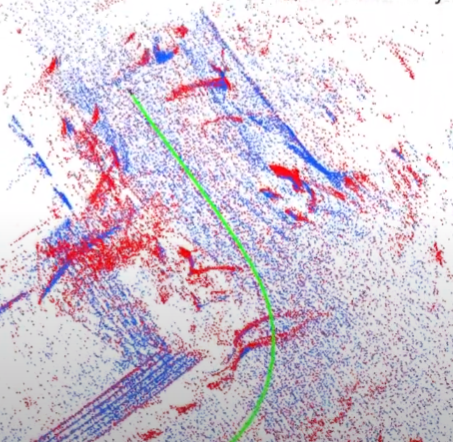
Visual-Inertial Localization with Prior LiDAR Map Constraints
Xingxing Zuo*,
Patrick Geneva*,
Yulin Yang,
Wenlong Ye,
Yong Liu,
Guoquan Huang
IEEE Robotics and Automation Letters, 2019
bibtex /
pdf /
video /
slides
|
|
|
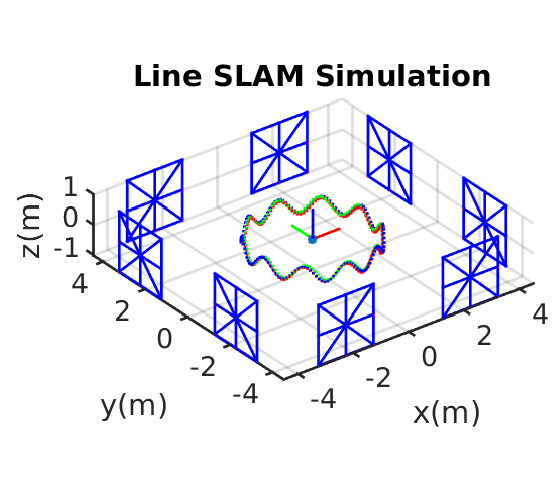
Visual-Inertial Navigation with Point and Line Features
Yulin Yang,
Patrick Geneva,
Kevin Eckenhoff,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
bibtex /
pdf /
video /
slides
|
|
|
LIC-Fusion: LiDAR-Inertial-Camera Odometry
Xingxing Zuo,
Patrick Geneva,
Woosik Lee,
Yong Liu,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019
bibtex /
pdf /
arXiv /
video /
slides
|
|
|
A Linear-Complexity EKF for Visual-Inertial Navigation with Loop Closures
Patrick Geneva,
Kevin Eckenhoff,
Guoquan Huang
International Conference on Robotics and Automation (ICRA), 2019
bibtex /
pdf /
tech report /
video /
poster
|
|
|
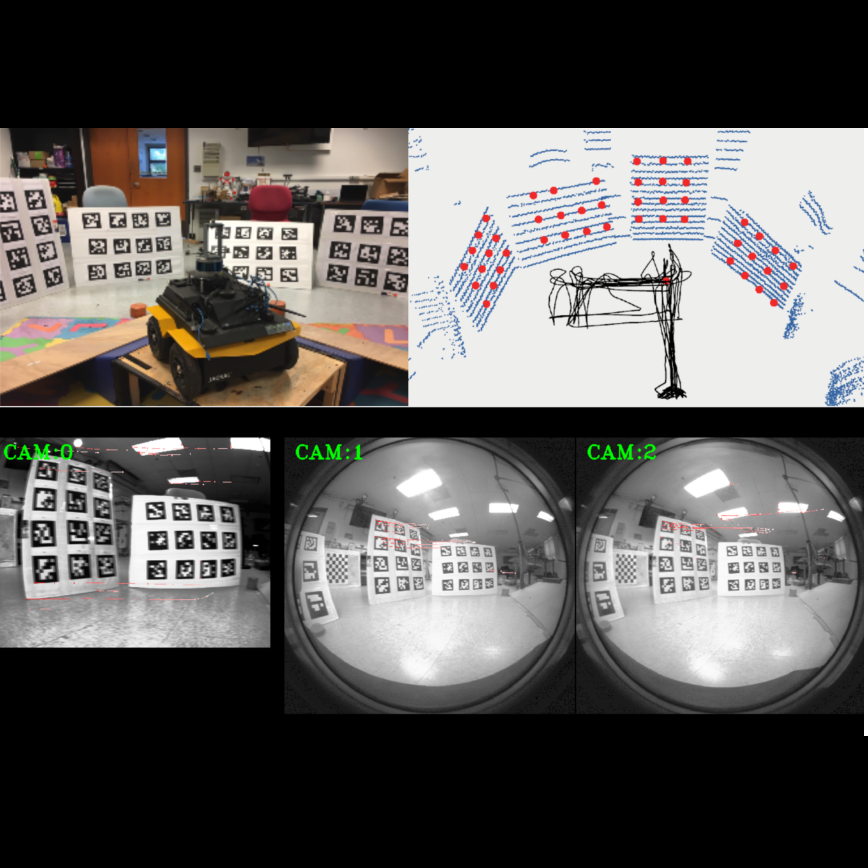
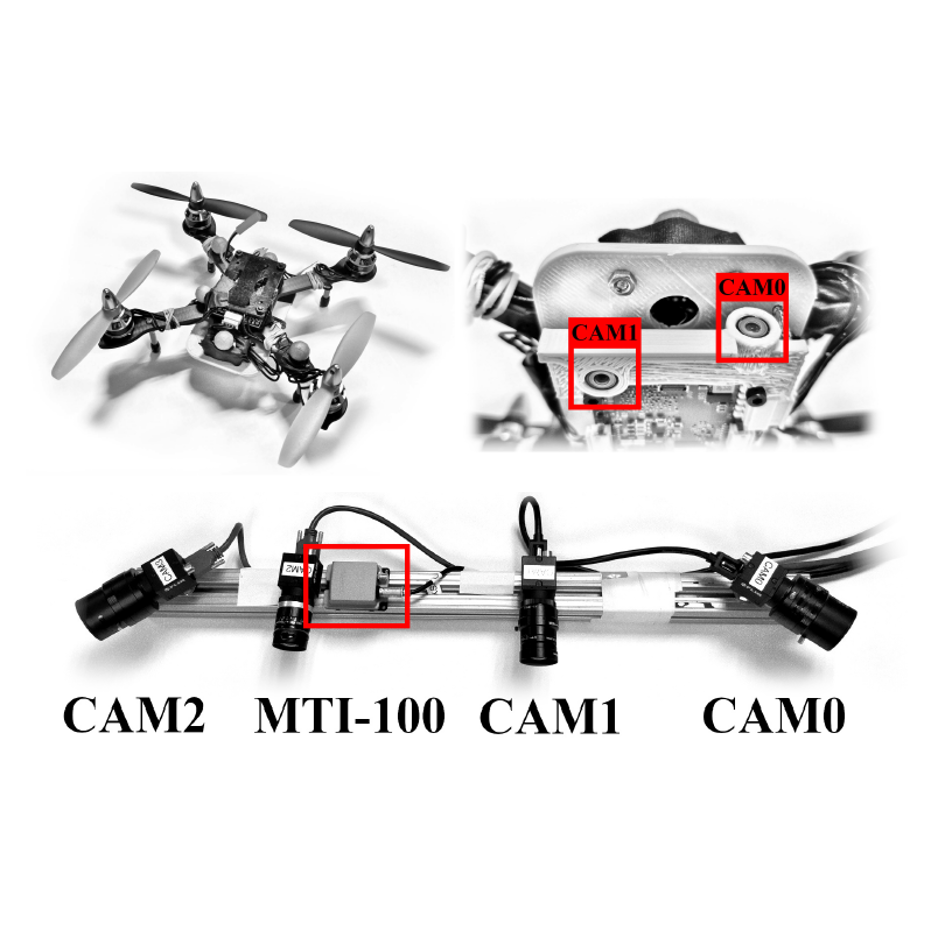
Multi-Camera Visual-Inertial Navigation with Online Intrinsic and Extrinsic Calibration
Kevin Eckenhoff,
Patrick Geneva,
Jesse Bloecker,
Guoquan Huang
International Conference on Robotics and Automation (ICRA), 2019
bibtex /
pdf /
tech report /
video
|
|
|
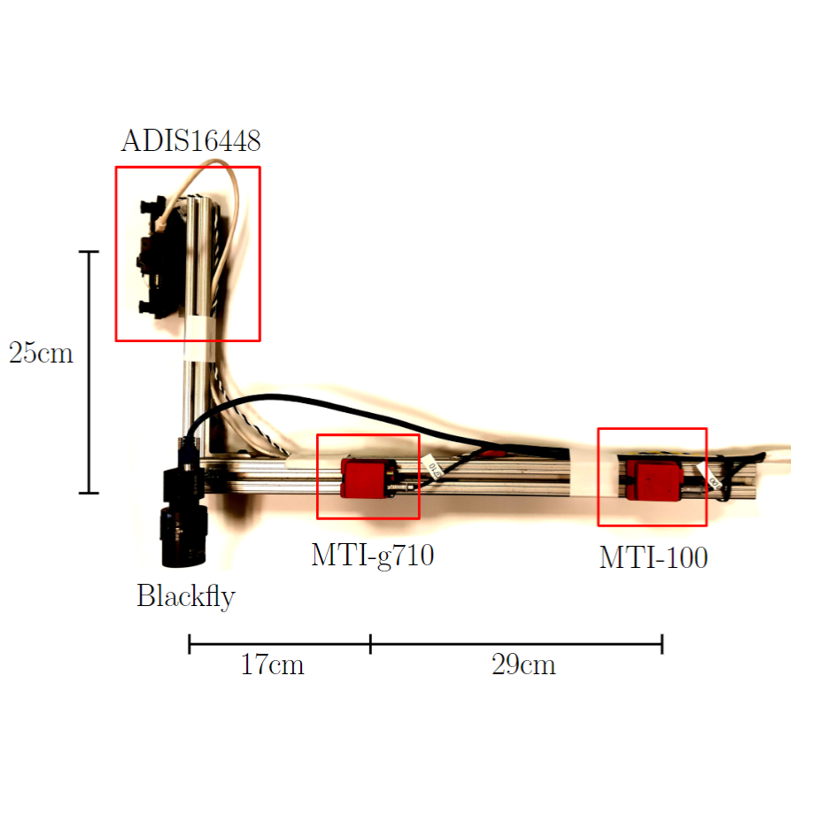
Sensor-Failure-Resilient Multi-IMU Visual-Inertial Navigation
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
International Conference on Robotics and Automation (ICRA), 2019
bibtex /
pdf /
video
|
|
|
Tightly-Coupled Aided Inertial Navigation with Point and Plane Features
Yulin Yang,
Patrick Geneva,
Xingxing Zuo,
Kevin Eckenhoff,
Yong Liu,
Guoquan Huang
International Conference on Robotics and Automation (ICRA), 2019
bibtex /
pdf /
tech report /
video /
poster
|
|
|
An Efficient Schmidt-EKF for 3D Visual-Inertial SLAM
Patrick Geneva,
James Maley,
Guoquan Huang
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019
bibtex /
pdf /
arXiv /
tech report /
video /
poster
|
|
|
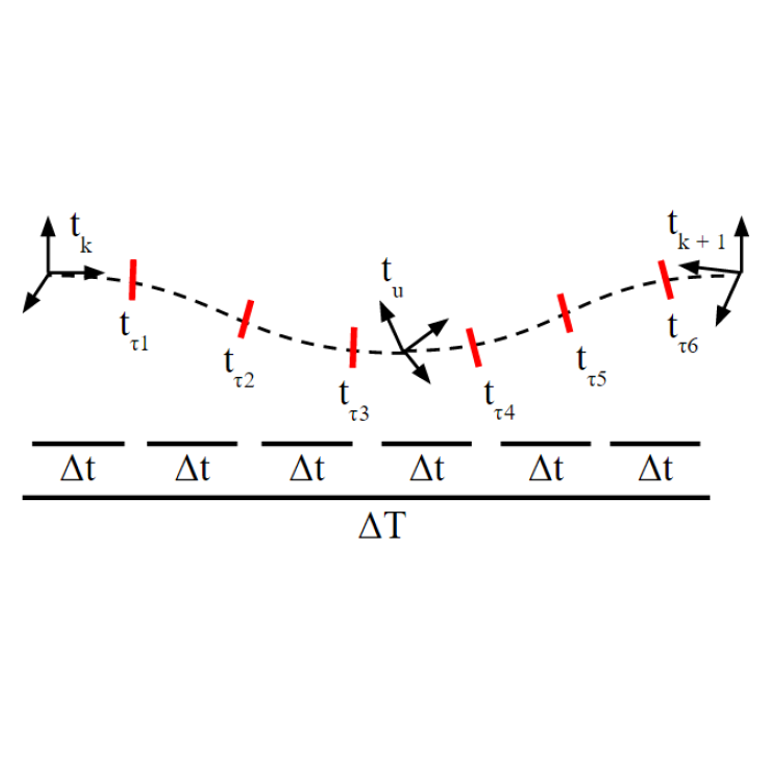
Closed-form Preintegration Methods for Graph-based Visual-Inertial Navigation
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
The International Journal of Robotics Research, 2019
bibtex /
pdf /
arXiv /
tech report /
video
|
|
|
OpenVINS: A Research Platform for Visual-Inertial Estimation
Patrick Geneva,
Kevin Eckenhoff,
Woosik Lee,
Yulin Yang,
Guoquan Huang
Workshop on Visual-Inertial Navigation: Challenges and Applications, 2019
bibtex /
pdf /
code /
poster
|
|
|
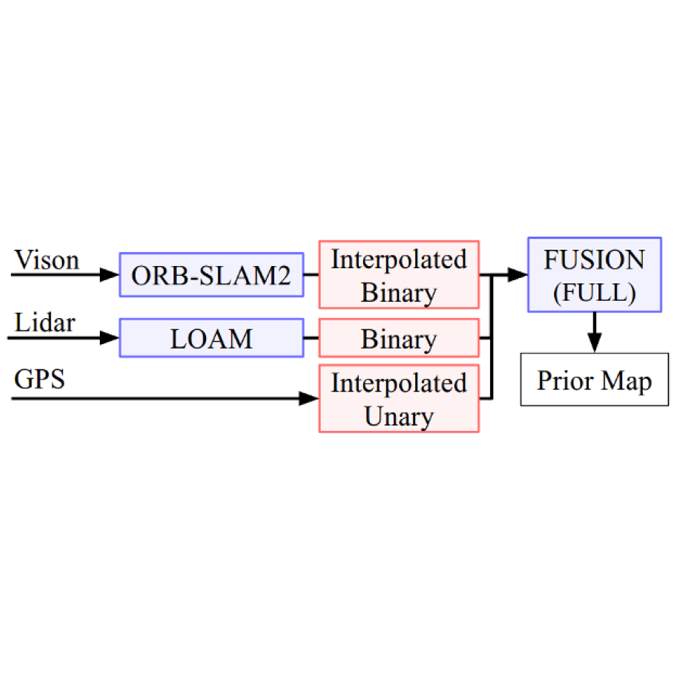
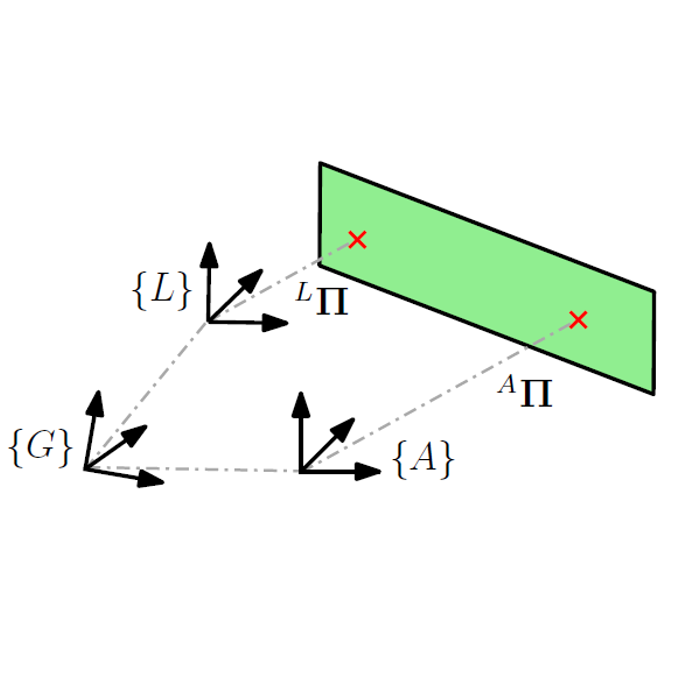
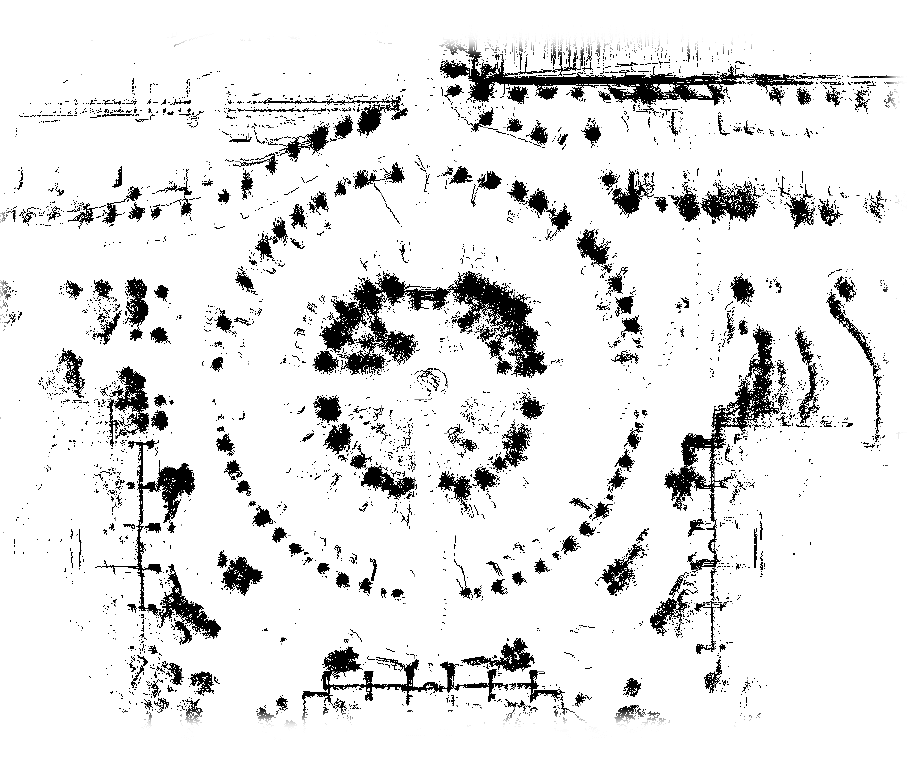
Asynchronous Multi-Sensor Fusion for 3D Mapping and Localization
Patrick Geneva,
Kevin Eckenhoff,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2018
bibtex /
pdf /
tech report /
video /
talk /
slides /
poster
|
|
|
LIPS: LiDAR-Inertial 3D Plane SLAM
Patrick Geneva,
Kevin Eckenhoff,
Yulin Yang,
Guoquan Huang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
bibtex /
pdf /
tech report /
video /
code /
slides /
poster
|
|
|
Direct Visual-Inertial Navigation with Analytical Preintegration
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
IEEE International Conference on Robotics and Automation (ICRA), 2017
bibtex /
pdf /
video /
slides
|
|
|
Asynchronous Multi-Sensor Fusion for 3D Mapping and Localization
Patrick Geneva,
Kevin Eckenhoff,
Guoquan Huang
Proc. of the 9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles, 2017
bibtex /
pdf /
video /
slides /
poster
|
|
|
High-Accuracy Preintegration for Visual-Inertial Navigation
Kevin Eckenhoff,
Patrick Geneva,
Guoquan Huang
Proc. of International Workshop on the Algorithmic Foundations of Robotics, 2016
bibtex /
pdf /
tech report /
video /
slides
|
|
|